幕布app中有什么特色功能 幕布app中特色功能的介绍
小伙伴们你们知道幕布app中特色功能吗?今天小编很乐意与大家分享幕布app中特色功能的图文讲解,感兴趣的可以来了解了解哦。
幕布app中特色功能的图文讲解
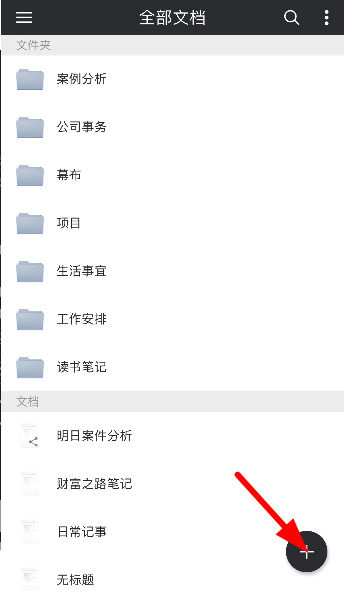
1、可以通过右下方按钮来新建文档或文件夹,对自己的想法进行记录和整理。
2、网格式的布局让你排版编辑更加简单,是进行头脑风暴时不可缺少的软件。

3、编辑好的笔记有着清晰而明确的脉络,让你在需要回顾时可以更简单的找到思路。

以上就是小编分享的幕布app中特色功能的图文讲解,是不是很棒啊,希望对你有所帮助哦。
免责声明:本文内容来自用户上传并发布,站点仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。请核实广告和内容真实性,谨慎使用。